General-purpose humanoid robots are designed to adapt to human-centric urban and industrial workspaces, tackling tedious, repetitive, or physically demanding tasks. They’re increasingly being used in factories and healthcare facilities to assist humans and alleviate labor shortages.

Acelere a Automação Com a NVIDIA Robotics
Explore a Próxima Onda de IA
Empresas em todo o mundo estão recorrendo a máquinas autônomas e robôs com IA para melhorar a eficiência, integrar novas tecnologias e enfrentar os desafios trabalhistas.
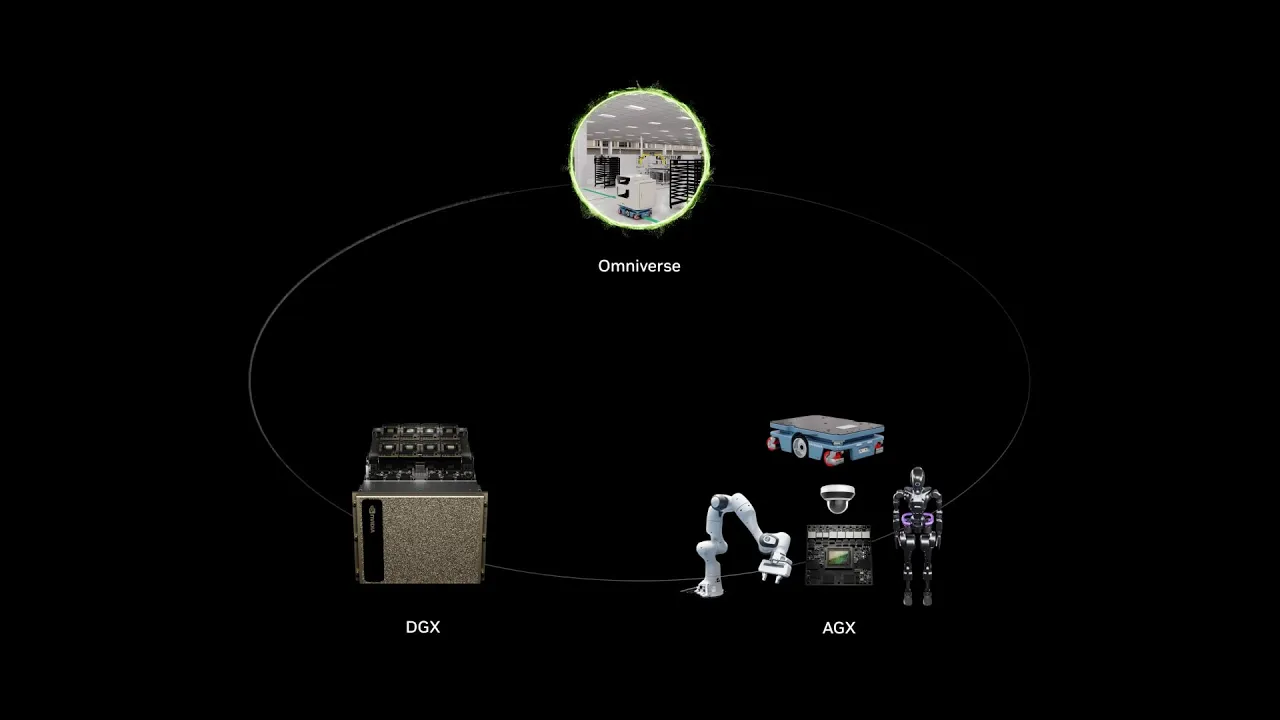
A solução de três computadores da NVIDIA permite que os robôs vejam, aprendam, percebam o ambiente e tomem decisões em tempo real. Isso é impulsionado por avanços na IA, computação acelerada, modelos base de robótica, simulação fisicamente precisa e um ecossistema sólido de parceiros de robótica.
A NVIDIA Robotics oferece tudo o que você precisa para criar, testar e implantar robôs de IA mais rapidamente, do cloud ao edge, incluindo hardware especializado, modelos de IA e ferramentas de desenvolvimento acessíveis.
Casos de Uso
Descubra a IA para Robótica
Humanoid Robots
Accelerate the development of advanced AI robotics.
Robot Learning
Train robot policies in simulation.
Robotics Simulation
Develop physically accurate sensor simulation pipelines for robotics.
Synthetic Data Generation
Accelerate development of physical and agentic AI workflows.
Industrial Facility Digital Twins
Develop advanced, generative AI-enabled virtual facility solutions.
Robot Safety
Build functional safety AI agents for industrial robots to ensure efficient, compliant operations.
Histórias de Sucesso
Veja o Impacto da IA no Mundo Real
Saiba como os robôs com IA e a computação acelerada estão aprimorando a autonomia, aumentando a eficiência e reduzindo os custos operacionais.
Tecnologia
IA para Robótica: Da Simulação ao Real, Da Nuvem ao Edge
Saiba mais sobre a plataforma NVIDIA Robotics para robótica e IA de visão.



Servidor RTX PRO: a Melhor Plataforma para IA Industrial e Física
O Servidor NVIDIA RTX PRO acelera todas as cargas de trabalho de digitalização industrial, simulação de robôs e geração de dados sintéticos.
Ecossistema
NVIDIA Robotics Partners and Ecosystem
Ecossistema ROS
O NVIDIA Isaac ROS é construído no framework de software ROS 2™ (Robot Operating System) de código aberto. Isso significa que milhões de desenvolvedores na comunidade ROS podem facilmente aproveitar as bibliotecas aceleradas pela NVIDIA e os modelos de IA para acelerar seus frameworks de desenvolvimento e implantação de robôs de IA.
Rede de Parceiros NVIDIA Jetson
Descubra uma grande comunidade de parceiros que podem ajudar você a construir seu sistema de robô completo com produtos que vão de placas especializadas a software de IA, serviços de design de aplicações, sensores e ferramentas de desenvolvedor.
Recursos
Explore a NVIDIA Robotics
-
Blogs
-
Vídeos
-
Comunidade





Próximos Passos
Pronto Para Começar?
Crie robôs móveis autônomos (AMRs), braços e manipuladores, humanoides e muito mais com a plataforma NVIDIA Isaac.
Mantenha-se Atualizado sobre as Notícias da NVIDIA
Receba as últimas notícias, tecnologias, avanços e muito mais sobre robótica, diretamente na sua caixa de entrada.