自駕車模擬
探索高擬真、多元的感應器模擬,開發安全的自駕車。
工作負載
模擬 / 建模 / 設計
產業別
汽車與交通
業務目標
投資報酬率
風險減輕策略
產品
NVIDIA Omniverse Enterprise
NVIDIA OVX
NVIDIA DGX
概覽
高擬真自駕車模擬需求
自駕車模擬技術重要的理由:

安全
渲染惡劣天氣、車流變化等各種行車狀況,不必在現實世界經歷罕見、危險的場景。

成本效益
透過生成資料滿足模型需求,加速開發並降低對高成本資料收集車隊的依賴。

擴充性和靈活性
在製作實體原型之前部署虛擬車隊,為新的感測器和堆疊建立原型。
快速連結:
技術實作過程
大規模執行符合物理定律的精確自駕車模擬
開發人員採取以下步驟即可開始建置自駕車模擬管線。
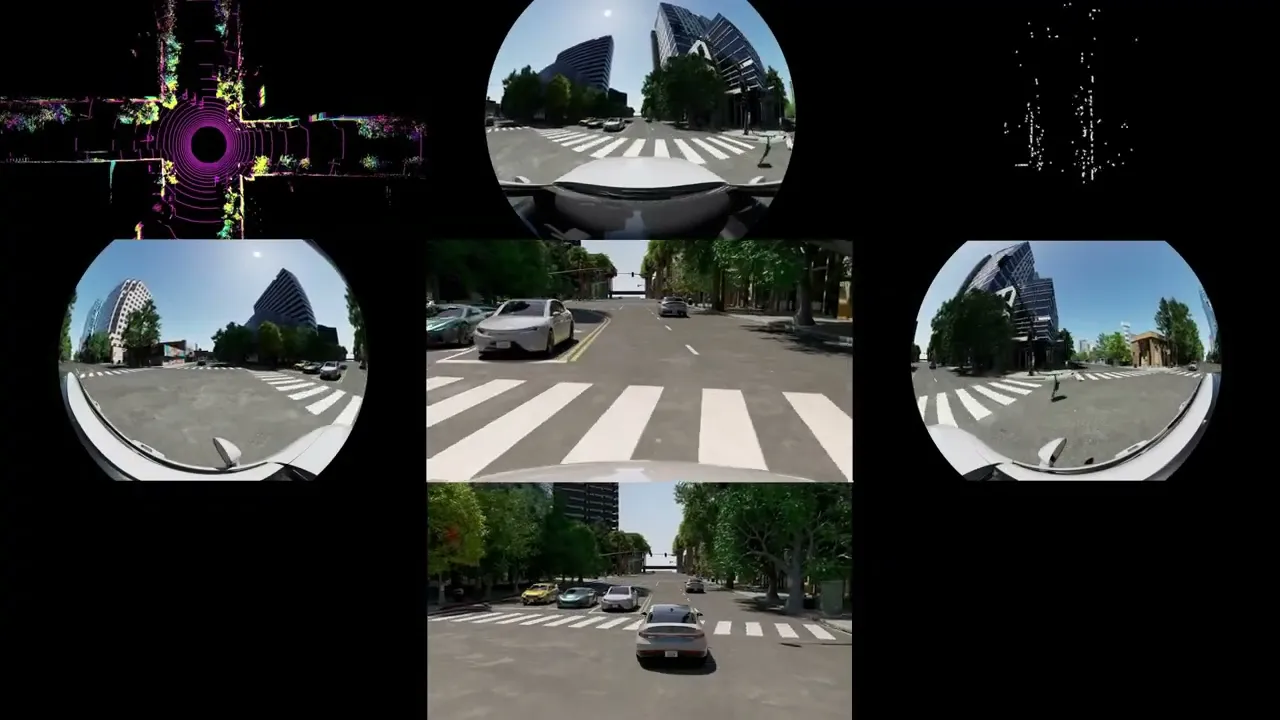
透過數位孿生重現真實世界資料,突顯 CARLA 中的資料變異
NVIDIA Omniverse™ NuRec 提供神經重建與渲染的 API 和工具,讓開發人員能將感測器資料化為高擬真度 3D 數位孿生、模擬新事件,並從全新角度渲染資料集。
Cosmos Transfer 以真實資料與結構化資料輸入為基礎,生成全新的光線、天氣與地形,將單一駕駛情境化為成千上百種情境。開發人員可使用提示與感測器資料作為輸入內容,為現有場景生成不同變化版本。
NuRec 與 Cosmos Transfer 皆整合頂尖的開源自駕車模擬器 CARLA。平台整合方便開發人員使用光線追蹤,透過高斯重現技術生成感測器資料,再利用 Cosmos WFM 豐富場景。
開發人員可利用這些工具:
- 在重建場景模擬全新軌跡與攝影機視圖
- 使用 CARLA 的 API 與交通模型,打造各式各樣逼真的情境
- 利用 ITRA 和 Foretellix 等行為代理模型,實現先進的交通與行為多樣性
這項整合包含預先重建場景的入門套件,可快速建立開發自駕車所需的極端案例資料集。
使用 NVIDIA Cosmos 加速模擬
開發人員可使用最新的 NVIDIA Cosmos 資料處理工作流程和世界基礎模型,及快速、可擴充的合成資料生成輔助自駕車開發。使用 Cosmos Curator 篩選、注解、刪除大量重複的資料集,並使用 Cosmos Dataset Search 快速建立自訂的訓練後期資料集。Cosmos Predict 和 Cosmos Transfer WFM 生成新的影片資料,可供測試和驗證使用,也可延伸運用於天氣、照明和地形條件。
快速連結
合作夥伴
開始使用自駕車模擬
瞭解我們的合作夥伴如何推出符合物理原則的模擬,開發安全、高效的自駕車。

常見問答集
登記表單以獲得最新資訊。
最新消息



 端對端自動駕駛大挑戰")
使用案例與示範