自動運転車両の
シミュレーション
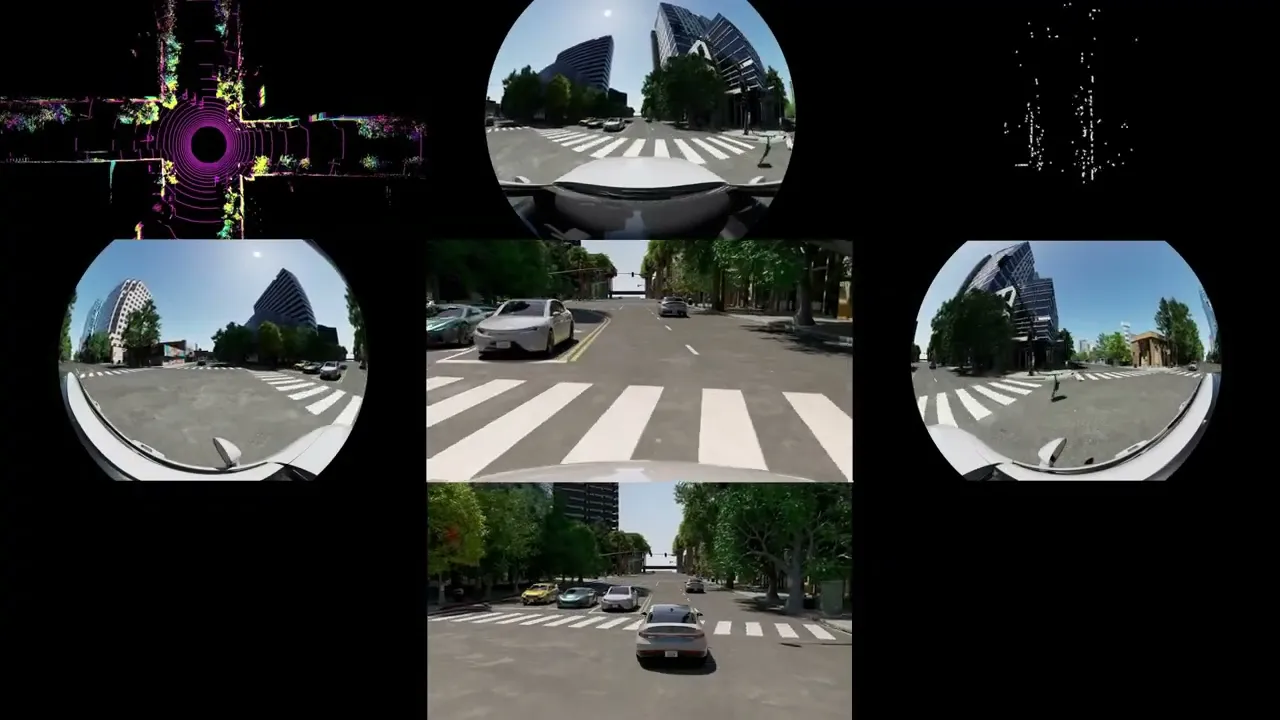
安全な自動運転車開発のための高忠実度で多様なセンサー シミュレーションをご覧ください。
ワークロード
シミュレーション / モデリング / デザイン
業種
自動車および輸送
事業目標
投資収益率
リスク軽減
製品
NVIDIA Omniverse Enterprise
NVIDIAOVX
NVIDIA DGX
概要
高忠実度 AV (自動運転車両) シミュレーションがもたらす可能性
AV (自動運転車両) の開発には、実際の道路で直面する実世界の状況を反映した膨大な量の学習データが必要です。センサー シミュレーションは、仮想環境で物理に基づいたセンサー データを提供することでこの課題に対応します。これらの物理原理に基づいて、世界基盤モデルのセンサー シミュレーションに、天候や明暗、ジオロケーションなどのバリエーションを持たせることができます。 稀にしか起きない危険な状況に実際に遭遇することなく、AV (自動運転車両) のトレーニング、テスト、検証を、これらの機能により大規模に実施できます。このセンサー データと環境相互作用の精度と多様性は、フィジカル AI の開発に不可欠です。
AV シミュレーションが重要な理由:

安全性
悪天候、交通状況の変化、稀にしか発生しない状態や、危険な交通シナリオなど、さまざまな運転条件を実際に遭遇することなくレンダリングできます。

費用効率
必要なデータを生成することで、高コストな実車によるデータ収集への依存度を軽減し、開発を高速化できます。

拡張性と柔軟性
物理的な試作車作成の前に、新しいセンサーやスタックを仮想フリートをデプロイしプロトタイピングができます。
クイック リンク:
技術的実装
物理的に正確な自動運転車 (AV) シミュレーションを大規模に実行
開発者は、以下の手順を踏むことで、AV シミュレーション パイプラインの構築を始めることができます。
実世界データをデジタル ツインで再構築し、CARLA でデータ バリエーションを増幅
NVIDIA Omniverse™ NuRec は、ニューラル リコンストラクション (再構築) およびレンダリング用の API とツールを提供し、センサー データの高精度 3D デジタル ツインへの変換、新しいイベントのシミュレーション、新たな視点からのデータセットのレンダリングを開発者が実行できるようにします。
Cosmos Transfer は、グラウンドトゥルースと構造化データを活用して、様々な照度、天候、地形を生成し、単一の運転シナリオを数百ものバリエーションに増やします。開発者は、プロンプトとセンサー データを入力として使用し、既存のシーンの多様なバリエーションを生成できます。
NuRec と Cosmos Transfer は、いずれも最先端のオープンソース AV シミュレーターである CARLA と統合されています。この統合により、開発者はレイ トレーシングを用いた Gaussian ベースの再構成からセンサー データを生成し、Cosmos WFM によってシナリオの多様性を拡張できます。
これらのツールにより、開発者は次のことができます。
- 再構築されたシーンで新しい軌道とカメラ ビューをシミュレーションする
- CARLA の API と交通モデルを使用して、多様かつ現実的なシナリオを作成する
- ITRA や Foretellix などの行動エージェント モデルを活用して、高度なトラフィックと行動の多様性を実現する
この統合には、事前再構築済みシーンのスターター パックが含まれており、AV 開発向けの多様なコーナー ケース データセットを迅速に作成できるようになります。
NVIDIA Cosmos でシミュレーションを高速化
開発者は、最新の NVIDIA Cosmos データ処理ワークフローと世界基盤モデルを活用することで、スピードと拡張性に優れた合成データ生成により自動運転開発を強化できます。Cosmos Curator を使用して大規模データセットのフィルタリング、アノテーション、重複排除を行い、Cosmos Dataset Search により、用途に合わせたポストトレーニング用データセットを速やかに作成できます。Cosmos Predict と Cosmos Transfer の WFM を用いることで、試験および有効性検証向けの新たな動画データを生成し、天候・照明・地形といった条件にわたってスケールします。
クイック リンク
パートナー
AV シミュレーションを始める
パートナーが安全で効率的な自動運転車開発のために物理学に基づいたシミュレーションをどのように提供しているか、ご覧ください。

ニュース




ユース ケースとデモ