汎用ヒューマノイド ロボットは、人間中心の都市や産業の作業環境に適応し、退屈で繰り返しの多い、または身体的に負担の大きい作業に対応するよう設計されています。これらのロボットは工場や医療施設で人間を補助し、労働力不足を緩和するためにますます活用されています。

AI ロボットの次の波を加速させる
AI の次なる波を探る
いつの日か、動くものすべてが自律に 経営の効率化、労働力不足の解消、繰り返し作業の最適化、危険な作業や環境への対策に業界が取り組む中、自律マシンや AI ロボットに対する需要がかつてないほど高まっています。
AI、アクセラレーテッド コンピューティング、物理ベース シミュレーションが大きく進歩し、センサーとアクチュエーターからなるエコシステムが広大になったことで、現代の AI ロボットでは、高い精度で適応し、学習し、複雑な作業をこなすことが簡単になりました。
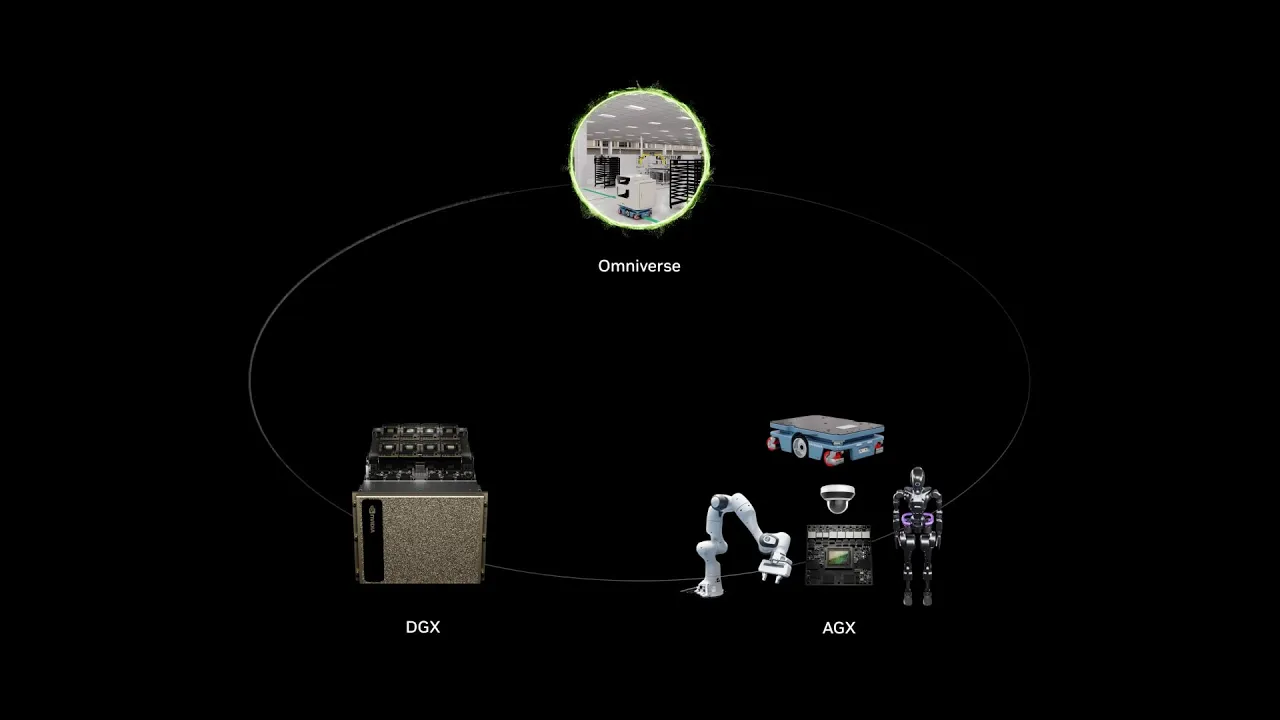
開発者は、NVIDIA Robotics のフルスタック、クラウドからエッジまで高速化されたシステム、高速化ライブラリ、最適化された AI モデルを使用し、ロボットのシステムとソフトウェアを開発、トレーニング、シミュレーション、デプロイ、運用、最適化しています。
ユース ケース
ロボティクスのための AI を発見する
ヒューマノイド ロボット
先進的な AI ロボティクスの開発を加速します。
ロボット学習
シミュレーションでロボット ポリシーをトレーニングしましょう。
ロボティクス シミュレーション
ロボティックス向けの物理的に正確なセンサー シミュレーションのパイプラインを開発します。
合成データ生成
フィジカル AI とエージェント型 AI ワークフローの開発を加速します。
産業用施設デジタル ツイン
高度な生成 AI を活用した仮想施設ソリューションを開発します。
ロボットの安全性
効率的で各種規制に準拠した運用を確保するために、産業ロボット用の機能安全 AI エージェントを構築しましょう。
成功事例
AI の実世界への影響を見る
AI を活用したロボットとアクセラレーテッド コンピューティングが、自律性向上、効率性向上、運用コスト削減にどのように役立っているかをご覧ください。
テクノロジ
ロボティクスのための AI — シミュレーションから現実に、クラウドからにエッジまで
ロボティクスとビジョン AI のための NVIDIA Robotics プラットフォームの詳細をご覧ください。



RTX PRO サーバー — 産業用およびフィジカル AI に最適なプラットフォーム
NVIDIA RTX PRO サーバーは、あらゆる産業のデジタル化、ロボット シミュレーション、合成データ生成ワークロードを加速します。
エコシステム
NVIDIA Robotics のパートナーとエコシステム
ROS エコシステム
NVIDIA Isaac™ ROS はオープンソースの ROS 2™ (Robot Operating System) ソフトウェア フレームワークをベースに開発されています。つまり、ROS コミュニティの無数の開発者たちが、NVIDIA によって高速化されたライブラリと AI モデルを利用し、AI ロボットを短期間で開発し、ワークフローをデプロイしています。
NVIDIA Jetson™ パートナー ネットワーク
専用のボードから AI ソフトウェア、アプリケーション設計サービス、センサーや開発者ツールまで、さまざまな製品を提供して完全なロボット システムの構築を支援しているパートナーによる大規模なコミュニティをご覧ください。
関連情報
NVIDIA ロボティクスを探索する
-
ブログ
-
動画
-
コミュニティ





次のステップ
さっそく始めませんか?
NVIDIA Isaac プラットフォームで、自律移動ロボット (AMR)、アーム、マニピュレーター、ヒューマノイドなどを作成できます。
NVIDIA の最新情報を受け取る
最新のロボティクス ニュース、テクノロジ、ブレークスルーなどを NVIDIA からメールでお届けします。